











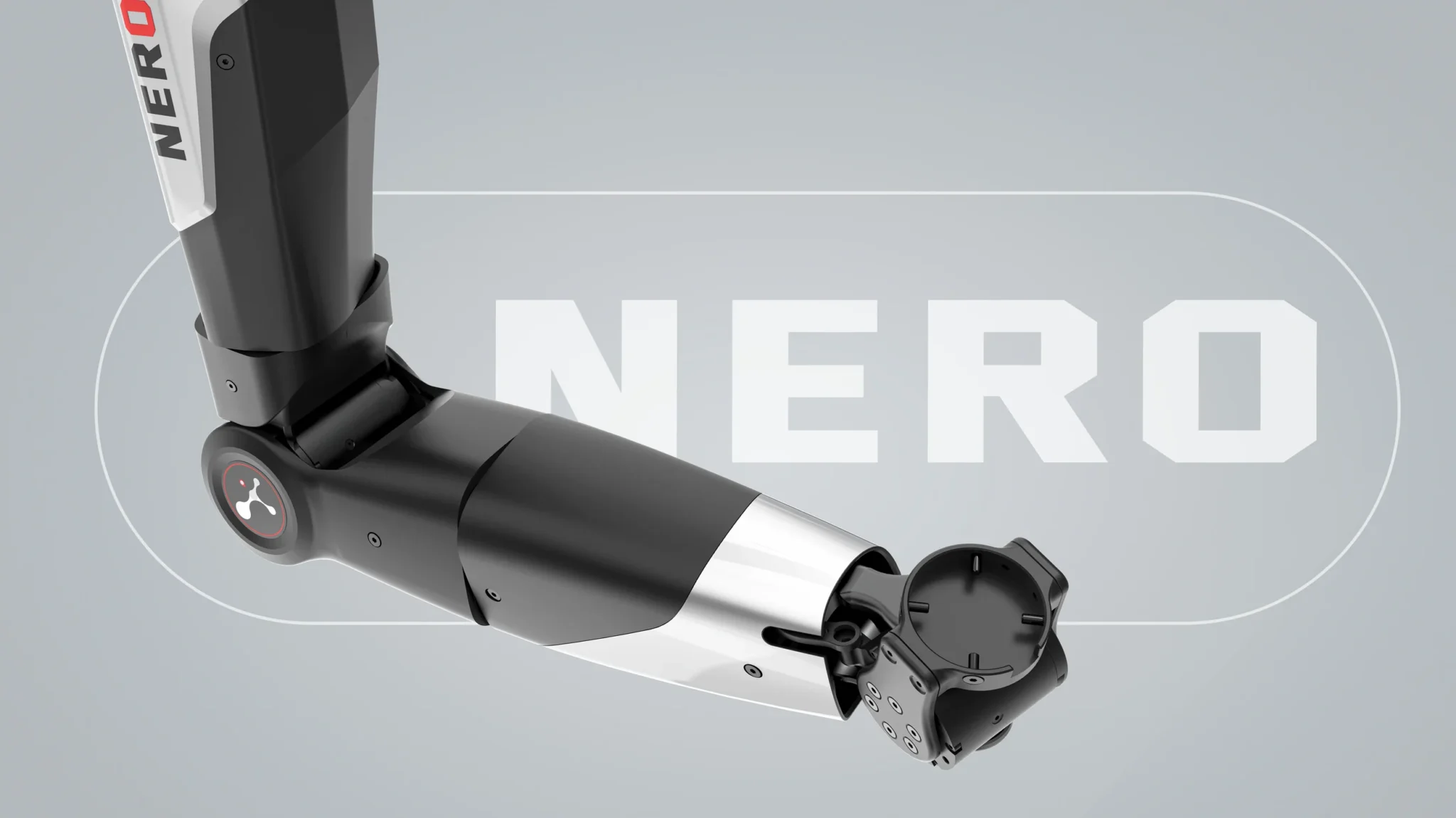
NERO 7-DOF Robotic Arm – Humanoid Research & Embodied Intelligence
$3,380.00
One More DOF, One Step Ahead in Humanoid Robotics
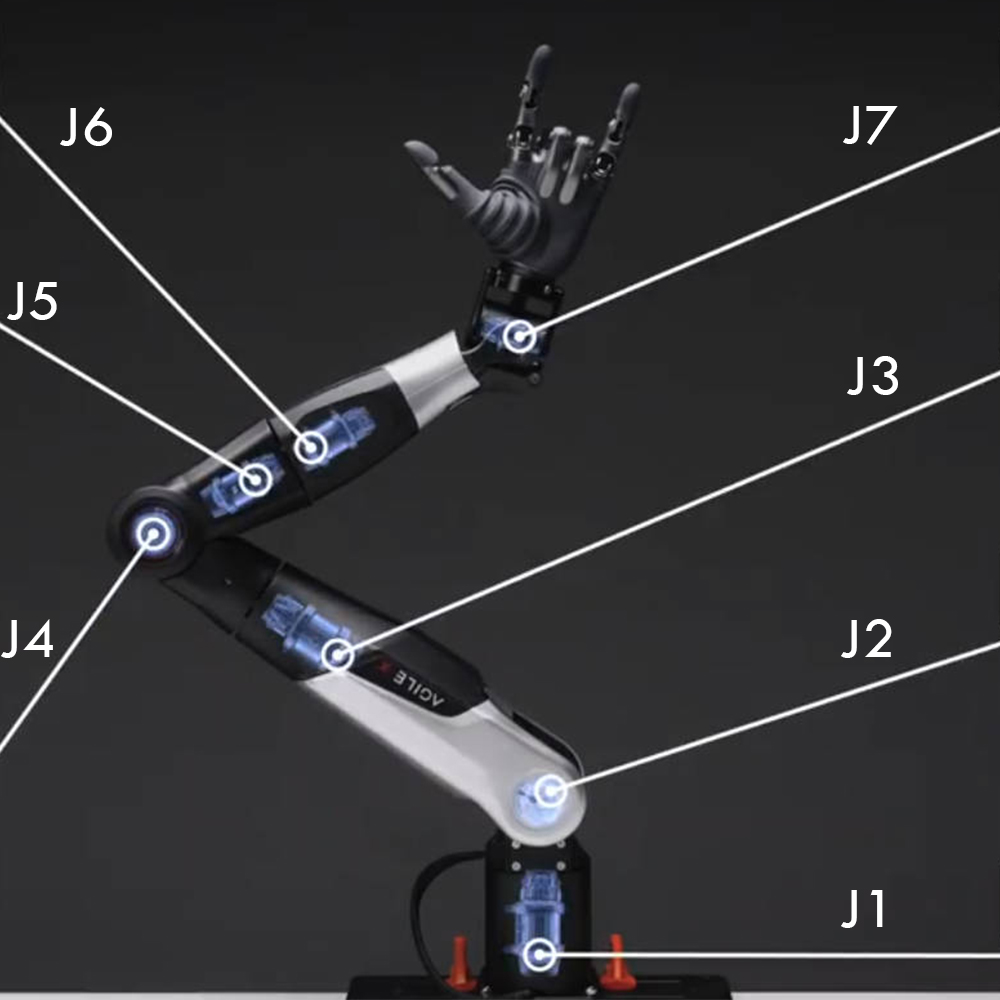
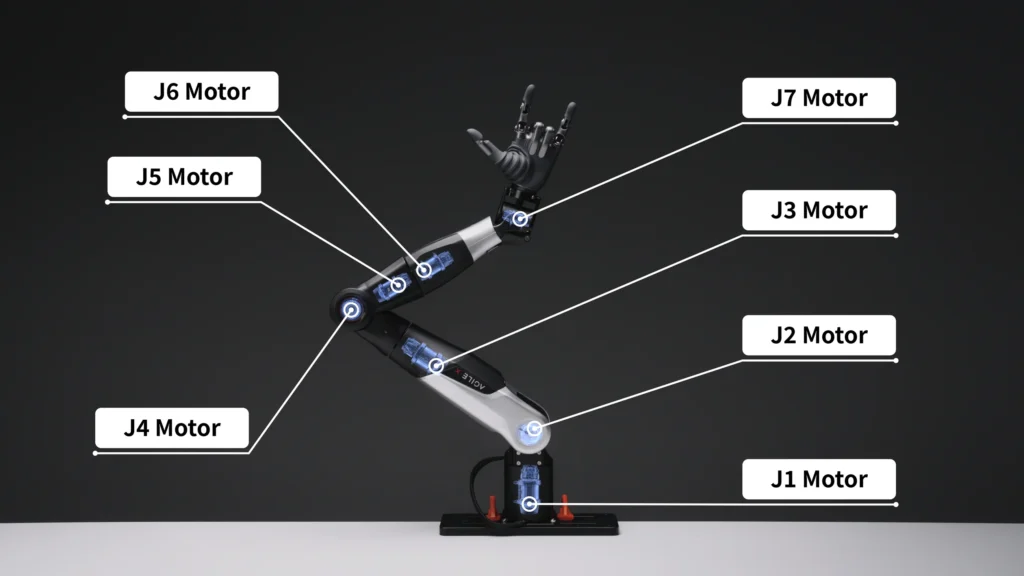
NER0’s humanoid seven-axis redundant configuration doesn’t just add an extra degree of freedom—it fundamentally transforms what’s possible. By replicating the natural movement characteristics of the human arm, NER0 enables more intuitive programming, obstacle avoidance, and human-like manipulation that six-axis arms simply cannot achieve.
🦾 True Humanoid Kinematics: 7 Degrees of Freedom. Natural, human-like movement patterns for realistic interaction. Superior obstacle avoidance and workspace flexibility. Ideal for human-robot collaboration research and embodied intelligence applications.
⚡ Remarkably Lightweight: Just 4.8kg, easily portable between workstations and lab environments, simple one-handed deployment and repositioning. Reduced payload requirements for mobile platform integration, perfect for humanoid robot upper limb applications without structural strain.
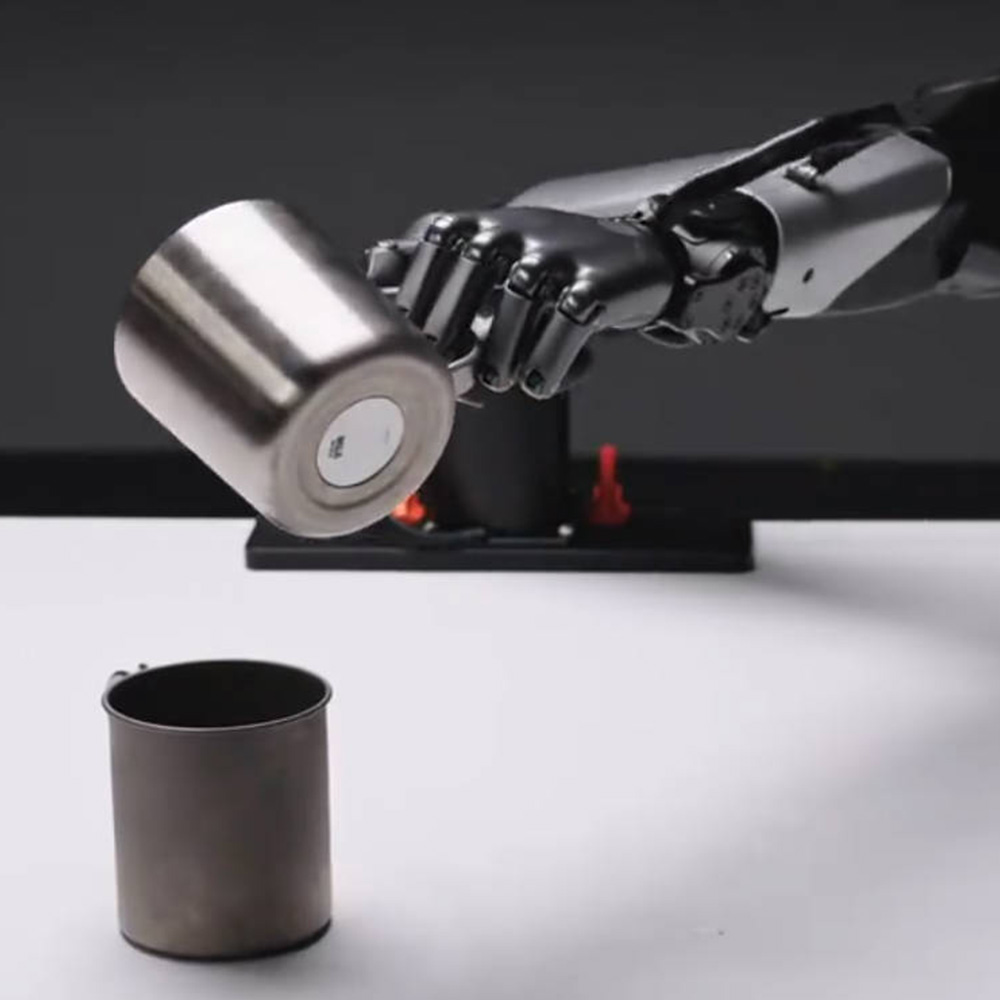
📏 Desktop-Scale Workspace: 580mm Working Radius, covers standard desktop and benchtop experimental areas, optimal for tabletop manipulation research, compact footprint maximizes lab space efficiency, sufficient reach for most research scenarios and demonstration setups
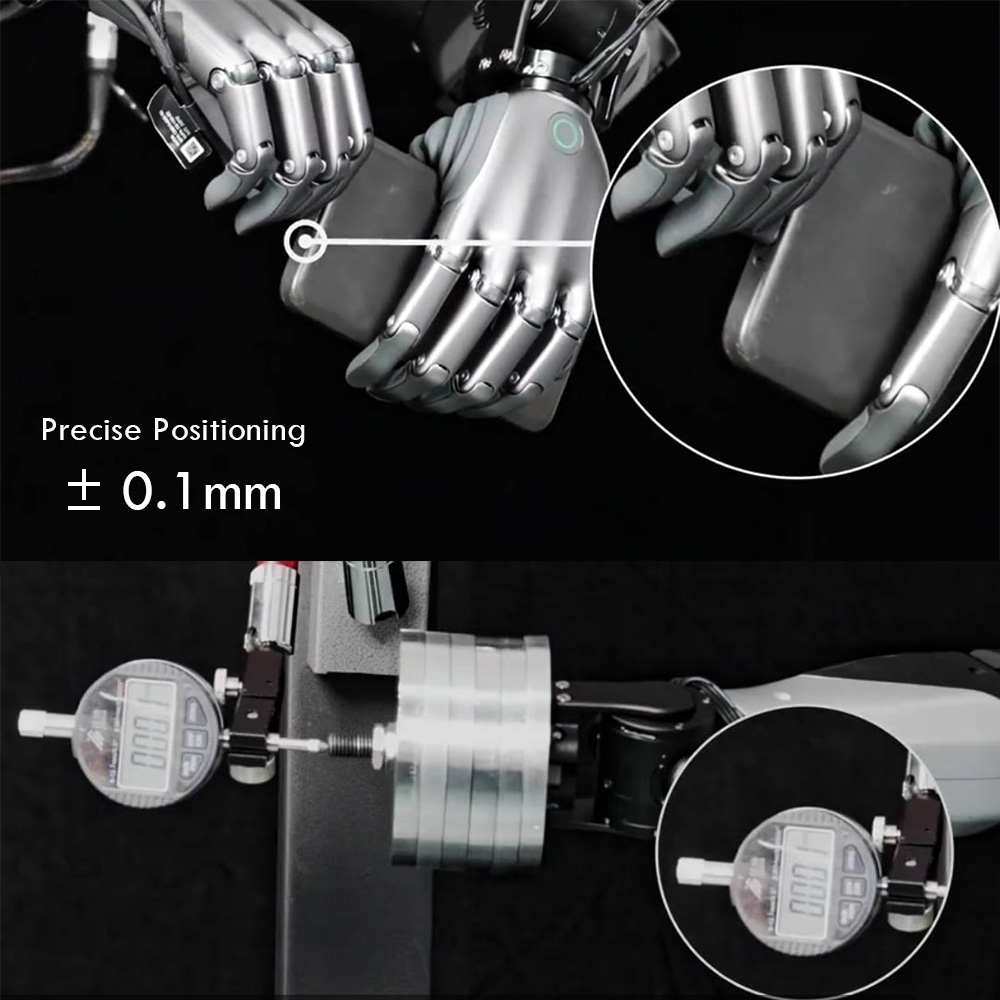
🎯 Research-Grade Precision: ±0.1mm Repeatability, reliable, reproducible experimental results, consistent data acquisition across test iterations, precision sufficient for delicate manipulation tasks.




-1024x569.jpg)
.jpg)



